Lora Oehlberg, INRIA
The international network of digital fabrication sites is steadily growing – in high school or university workshops, research labs, professional rapid manufacturing companies, and independent open-access do-it-yourself workshops. This opens up new possibilities for design collaboration between designers and manufacturers in many different locations. In addition to sharing digital design files, remote collaborators can simultaneously fabricate, assemble, and modify designs in distributed locales. At least two user groups – excedring makers learning new skills, and budding entrepreneurs developing new product ideas – could benefit from collaborative remote fabrication in a number of different scenarios:
1) Remote real-time teaching and mentoring of excedring makers. Students often need targeted mentoring in areas outside their expertise: for example, computer science students in an interactive device design course may need help from experts in solid modeling or PCB design to review designs and offer critique. By bringing remote collaboration into the fab lab, experts from industry or other fab labs around the world can be called in to help teach new skills and mentor new makers on their projects.
2) Remote design and debugging for manufacture. Small, independent manufacturing companies are appearing at mainstream product shows and, in many cases, offering more innovative products than large traditional product companies. However, these small companies often have less opportunity to visit manufacturing sites to debug design and manufacturing problems. Connecting on-site designers and technicians at the manufacturing site with remote collaborators in the design studio – who may have more design expertise or an understanding of design rationale – can better inform how to develop, debug, and refine a design or manufacturing process.
3) Distributed product companies. Distributed development tools made open-source software possible – they empowered individual programmers to make meaningful contributions to large, complex projects and enabled the formation of geographically distributed development communities. In the world of physical products and electronic hardware, collaborative remote fabrication offers the opportunity for open-source product development. It also opens the potential for distributed manufacturing, allowing companies to locally scale-up production for specific markets.
Our research goals are to first understand the unique opportunities and challenges of remote collaborative fabrication; and then to create and evaluate new design and collaboration tools that address these issues.
To test how remote collaborative fabrication could be managed with current technology, we experimented with remote fabrication across UC Berkeley and INRIA Paris-Saclay. The participants at each location worked on a common task: design and prototype a wine rack that can be manufactured using a laser cutter. We connect our laser cutter-equipped fabrication labs using a variety of off-the-shelf technologies:
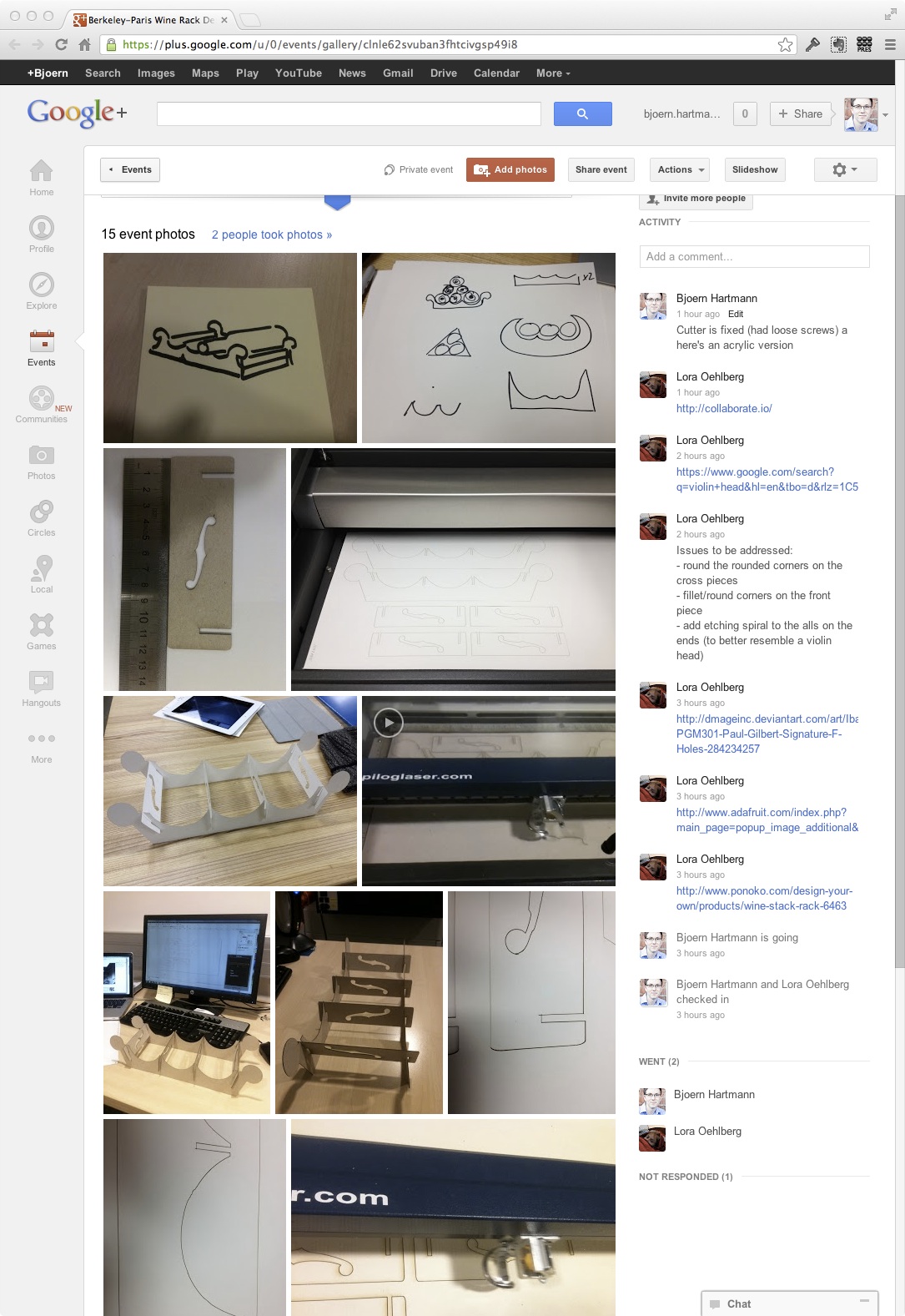
- Google+ Hangouts & Events – A hangout is a multi-party videoconference. We adapt hangouts to stream multiple different video streams from the same user simultaneously (e.g., the user’s desktop, a face-to-face view, and a mobile device video feed – see Figure 1). Embedding hangouts in virtual “events” makes it easy to attach static images to such conversations (Figure 2).
- Dropbox – We use Dropbox for file sharing. Shared files include the design documents themselves, as well as background research and reference information, e.g., tables that list common wine bottle sizes.
Figure 1: A hangout session with six video streams, three from Berkeley (highlighted in blue, 1B) and three from Paris (highlighted in pink, 1B), each containing: face-to-face video, screen sharing, and mobile video.
Figure 1A)
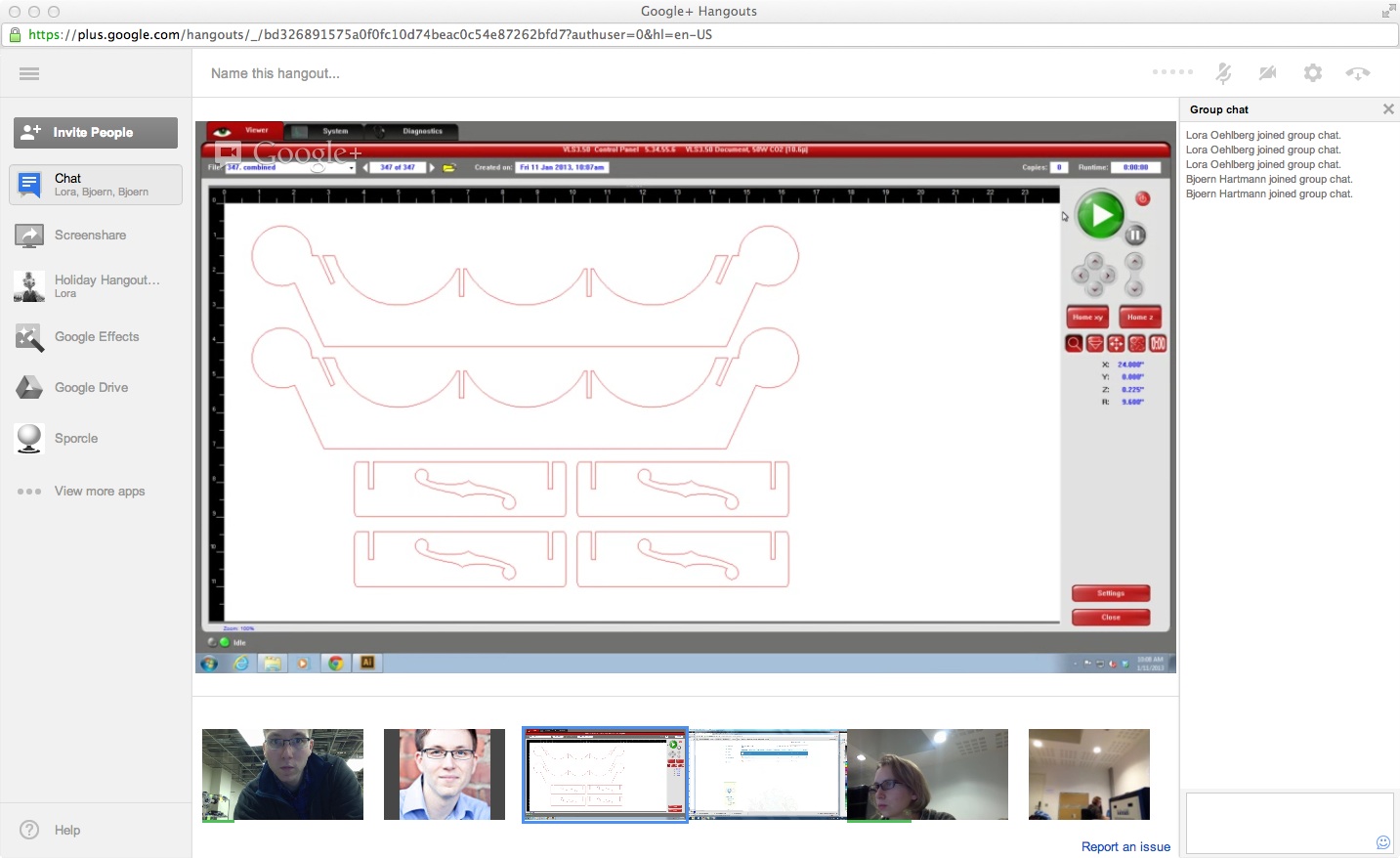
Figure 1B)

Figure 2: Our Google+ Event allowed us to quickly share photos of sketches and prototypes in progress, taken with smartphones.
In this first experiment, we started with individual background research; then, via our remote link, we sketched out a few initial designs on paper (Figure 3A); we articulated a design using vector drawing tools (e.g., Adobe Illustrator, Corel Draw); we tried laser cutting physical models (Figure 3B) from a range of materials including paper, cardstock, carton bois, and acrylic; and we eventually tested them in context (Figure 3C).
Figure 3: Following a wine rack design from early sketches (A), to the laser cutter (B), to testing at home with the carton bois prototype (C).
Figure 3A)
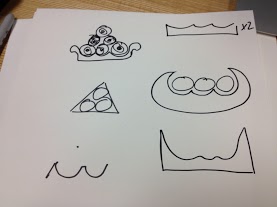
Figure 3B)
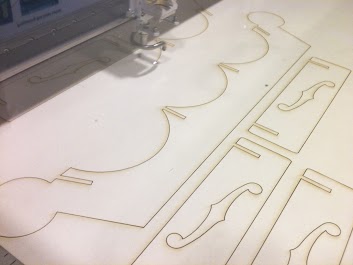
Figure 3C)

Our trans-Atlantic fabrication experiments have highlighted several issues with current tools:
Conversations about digital and physical designs require multiple media formats.
Remote collaborative fabrication requires more than a simple video and audio link. In addition to face-to-face videoconferencing, we also needed to:
- quickly show images of our hand-sketches,
- demonstrate a detailed flaw of a prototype or material cross-section through close-up video,
- discuss features of a vector drawing through screen sharing and shared gestures on that screen, and
- share high-resolution still images of finished prototypes.
… and that’s still not quite enough. While all of these different channels are needed to communicate around physical fabrication, management of attention quickly became an issue – both in pulling a desired view from a remote collaborator’s channel, or pushing content to a remote collaborator’s display.
Figure 4: Collaboration requires many channels, including a videoconferencing “talking head,” screensharing digital designs, cellphone cameras for impromptu photographs of sketches, an inspection camera to show materials and prototypes close-up, and an of the laser cutter to show fabrication in process.
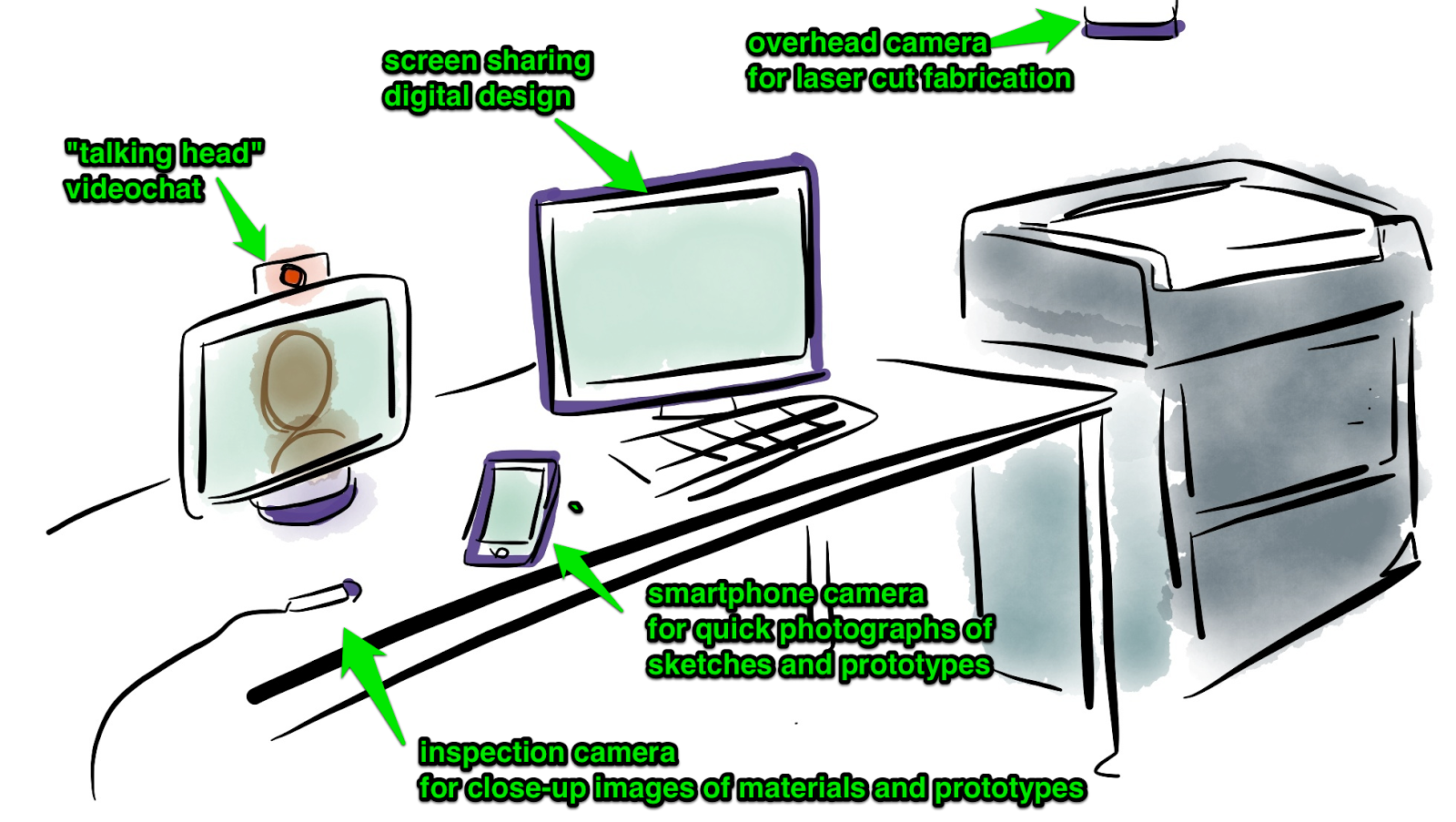
One possible addition is to have a more dedicated, expressive physical presence to represent the remote collaborator in the local fablab. Another concept is to more clearly indicate where the remote participant’s attention is at any given moment: this could also help indicate whether or not they are operating machinery and are, therefore, unreachable for safety reasons.
Asymmetries between collaborators
No two fab labs are exactly alike – each is tailored to local needs, budgets, and expertise. However, it’s important to identify where these asymmetries are: our first collaboration session started with an inventory of what equipment and materials are available on each end in order to make a plan on how to proceed together. There are several forms of infrastructural asymmetries that can exist:
Software. In our experiment, Berkeley could print to the laser cutter directly from Adobe Illustrator, while Paris had to print through CorelDraw. Fortunately, we could exchange common filetypes over Dropbox that could be opened on either end. However, we often needed to discuss and decide upon specific design details – in order to share a common view, we ultimately used screen sharing, gesture around the digital design through mouse movement to refer to specific design elements.
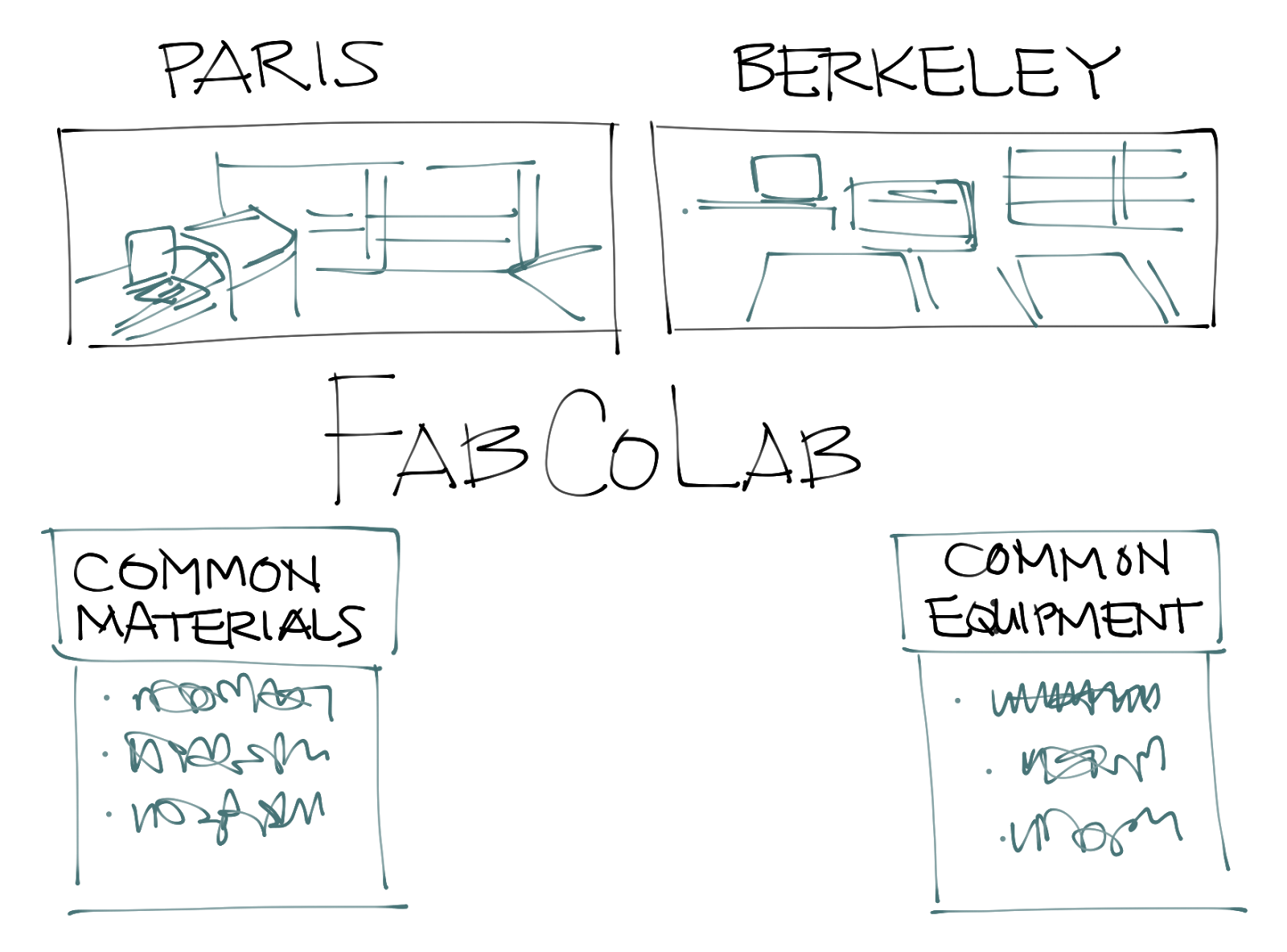
Tools and Settings. Local differences quickly appear once we translated digital designs into physical artifacts. For example, Berkeley and Paris each have different brands of laser cutter. The drivers for each of these laser cutters varies significantly: Berkeley’s laser cutter has a more extensive settings list for various materials and material thicknesses. Unfortunately, each machine’s laser is at a different wattage; frequency, power, and speed settings cannot be easily exchanged in order to match one machine’s settings to another. Currently, Berkeley has a 3D printer that uses multi-jet modeling; Paris has plans to acquire a 3D printer that uses cured liquid (SLS). Future collaborative fab labs could share inventories of tools and supplies such that each site has peripheral awareness of joint resources (Figure 5).
Figure 5: One way to create awareness of each others’ individual and common resources is to and combine local inventories to identify overlap in a website that is viewable from both locations. This can help identify what can be done remotely (e.g., using local materials) and what can be done at both sites (e.g., cutting acrylic).
Materials. Stores in different locales often stock different materials. The variety of locally-available materials also allow for products to be developed that are tailored to the local supply chain, or to test in a wider range of materials than is available at only one location. Additionally, early prototypes are also often created out of cheaper, thinner materials (e.g., paper or cardboard) before moving up to thicker materials (e.g., acrylic). However, slot-construction designs for laser cutters use the material thickness as a design parameter to determine the slot width. One solution to this is to introduce site-specific model parameters into the design tool that automatically adapt the model when a user chooses a local model material and thickness.
Scrap also differs in each fab lab; not all projects should necessarily be made out of virgin materials when scrap is readily available. However, this requires each local fab lab to customize shared design files to accommodate efficient use of their particular scrap. Future fab labs may be able to find ways to help designers lay out a design to optimally use local scrap (Figure 6).
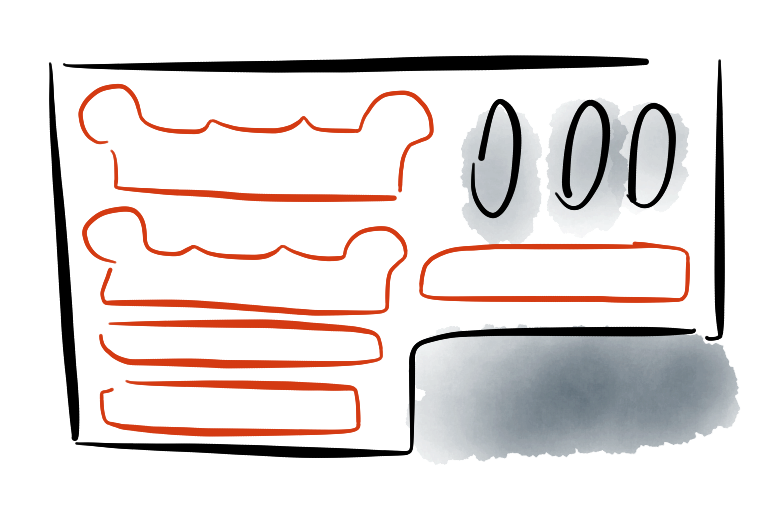
Figure 6: One way to technology could help designers intelligently use scrap is to scan the material (A), and then use the scanned image (B) to determine the optimal layout for the parts (C).
Figure 6A)
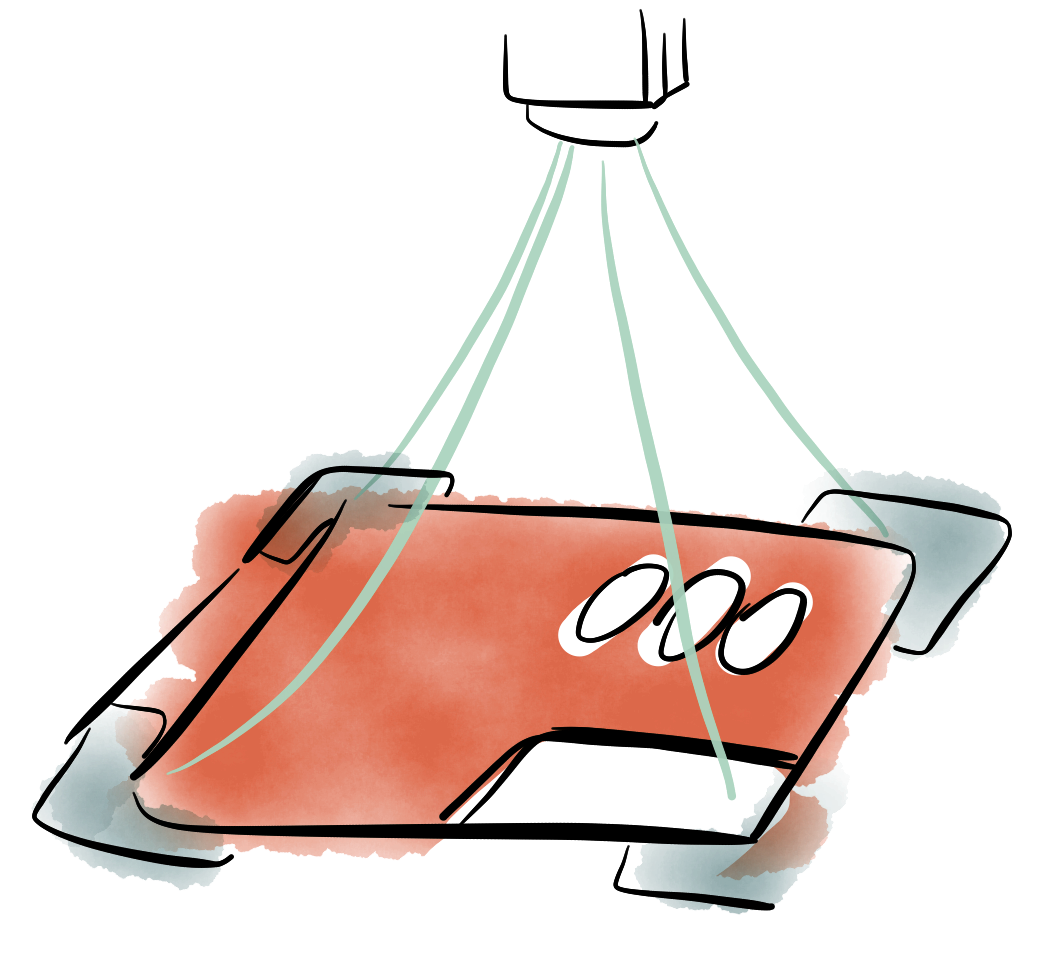
Figure 6B)

Figure 6C)
This is simply an initial list of issues discovered in our initial experiments; we intend to continue to experiment with remote collaborative fabrication and flesh out how fabrication practices vary given different collaborative scenarios. We also intend to implement some of the above proposed designs, in addition to others that we generate, and evaluate whether or not they enhance the abilities and experiences of remote prototypers.
Bio:
Lora Oehlberg is currently a post-doctoral researcher at INRIA working on how new technology and interactions can better support for distributed collaboration around prototyping. She has a PhD in Mechanical Engineering from the University of California, Berkeley. She also has an MS from the University of California, Berkeley and a BS from Stanford in Mechanical Engineering. Since starting her post-doc, she has been aggregating a list of prototyping resources local to Paris – namely prototyping supply sources, local fabrication groups and workshops, and a French-English glossary of prototyping vocabulary.